|
|
|
|

| |
|
|
|
|
| |
|
|
|
|
| |
|
Tablas de diseño de los más conocidos componentes en PDF:
Especificaciones de las familias lógicas |
 |
 |
74XXX |
4000 |
CADs y CDAs |
Transistores |
Amplificadores |
|
REGULADORES
DE TENSIÓN |
|
VARIOS |
|
|
|
| |
|
|
|
|
| |
|
Documentación sobre las placas Mini-ITX |
|
|
| |
|
|
|
|
| |
|
|
|
|
| |
|
|
|
|
| |
|
|
|
|
| |
|
|
|
|
| |
|
|
|
|
| |
|
|
|
|
PROYECTOS
MICROELECTRÓNICA Y ROBÓTICA
Proyecto METEO. Circuito ASIC para Sistemas de Medidas Ambientales
Finalizado
 |
|
Proyecto financiado por:  (Sociedad Anónima de Instalaciones de Control) y la Comisión Europea, Proyecto GAME (ESPRIT-III). (Sociedad Anónima de Instalaciones de Control) y la Comisión Europea, Proyecto GAME (ESPRIT-III).
Duración: 1994 - 1996
Financiación del proyecto: 11314.05  |
Desarrollo de un Circuito Integrado de Aplicación Específica (ASIC) con funciones de concentrador de datos en estaciones meteorológicas. Su objetivo principal es la adquisición de medidas (condiciones ambientales, como velocidad y dirección del viento, temperaturas, humedades relativas…) y la generación de señales analógicas y digitales telemandadas provenientes de un canal de radio o de un canal SPI. Se incluyen E/S digitales con funciones de seguridad. El circuito incluye convertidores digital-analógico y analógico-digital basados en lógica estocástica. Esto permite utilizar una tecnología puramente digital para efectuar dichas conversiones y mejorar sensiblemente las prestaciones de otras implementaciones que se habían utilizado hasta el momento. Diseñado en lenguaje Verilog y desarrollado con Cadence.
Ref. |
 |
|
|
(imagen ficticia)
|
|
|
|
| |
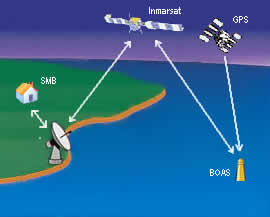
Proyecto BOAS. Circuito ASIC para Baliza Oceanográfica Acústica Satelital
Finalizado
|
|
Proyecto financiado por: SAINSEL SISTEMAS NAVALES, S.A. y la Comisión Europea, Prog. DG III, Proyecto FUSE (ESPRIT-IV).
Duración: 1996 - 1997
Financiación del proyecto: 27886.96 |
Desarrollo de un Circuito Integrado de Aplicación Específica (ASIC) para el control de las balizas oceanográficas acústicas (BOAS) a construir por SAINSEL. La funcionalidad del circuito se resume en la adquisición de datos de las aguas donde se encuentra la baliza (temperatura y salinidad) junto con información sobre el cardumen (especies marinas). Dicha información es transmitida a través de la red satelital INMARSAT al Sistema de Monitorización de Balizas (SMB) que se encuentra instalado en el barco de supervisión. Mediante el sistema de posicionamiento GPS transmitido por el satélite el integrado puede mandar al centro de control su posición con una precisión elevada. Uno de los aspectos críticos en el diseño es garantizar la recuperación de las balizas. En este sentido el integrado debe gestionar el consumo de los distintos subcircuitos externos para optimizar la carga de las baterías. Dado el interés que presenta el circuito como sistema de adquisición de datos y comunicación vía satélite con encriptación de datos, se define un segundo modo de funcionamiento en el que se puede conectar el ASIC a un sistema de navegación de buques, camiones, etc. El proyecto ha sido subvencionado por la Unión Europea a través de la acción especial FUSE del proyecto ESPRIT. Diseñado en lenguaje Verilog y desarrollado con Cadence.
|
(imagen ficticia)
|
|
|
|
| |
Investigación. Generador Aleatorio 'Ideal' de Secuencias de Pulsos
En curso
 |
|
Sin financiación..
Duración: 2002 - 2003 |
Tratamos de elaborar un método para implementar de forma automática generadores aleatorios de secuencias de pulsos con las siguientes características:
- Longitud variable previamente determinada.
- Diseño totalmente determinista (electrónica digital: puertas lógicas y biestables).
- Baja superficie de layout (minimizado).
- Escaso número de puertas (minimizado).
- Determinadas características matemáticamente prefijadas, e idénticas a la de un generador aleatorio de pulsos ideal.
Dichos generadores alimentarían circuitos de cálculo estocásticos, o todos aquello que necesiten de un generador 'ideal' con ciertas características matemáticas prefijadas.
La investigación pretender ver la luz en su publicación en la revista IEEE Transactions on Signal Processing.
|
|
|
|
|
| |
Proyecto ROBOT. Robot cuadrípedo
En curso
|
|
Sin financiación..
Duración: 2001 - ???? |
Desarrollo de un robot cuadrípedo con cámara y capacidad de autorrecarga. El robot comunica todos los datos a un servidor vía enlace WLAN, donde es procesada toda la información y recibe de vuelta instrucciones sobre su movimiento.
Está fabricado con piezas de Lego y metacrilato. Los motores son continuos con encoders resistivos.
Este proyecto está condicionado a multitud de desarrollos los cuales se encuentran en diferentes estados de progreso.
|
(imagen ficticia) |
|
|
|
|
|
|
|





 Volver arriba
Volver arriba